Here’s a myth I’ve been seeing around skincare communities: that you have to use a special cleanser to remove water-resistant sunscreen. For example:
“Keep in mind that most of these sunscreen actives are also oil-soluble (only dissolves in oil, not water), which gives sunscreens their water-proof and sweat-proof properties. Therefore, in order to completely remove sunscreen, you have to use an oil, cleansing oil, emollient cleanser, or makeup remover of some kind.” (Source: Skinacea)
Have we all been leaving sunscreen on our faces before we discovered the magic of double cleansing? Is it the only way to remove sunscreen from your skin?
How Cleansers Remove Sunscreen
Luckily, the answer is no. A regular cleanser will remove water-resistant sunscreen! The reason for this is surfactants.
Related post: Are You Washing Your Face Wrong? Busting Cleanser Myths (with video)
Surfactants are a special class of ingredient I’ve mentioned quite a few times before. They look a bit like a tadpole, with a lipophilic (oil-loving) “tail” and a hydrophilic water-loving) “head”:
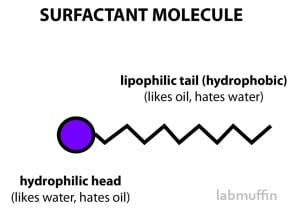
Because of this special structure, surfactants can help oil dissolve in water. The oil-loving tail grabs on to oily substances like sunscreen ingredients, while the water-loving head binds to water.
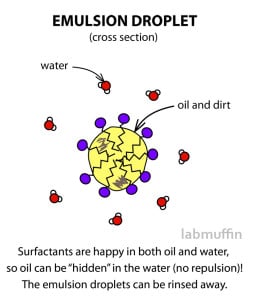
Essentially, the surfactant has an “oil” within its structure!
The surfactants help the oily substances lift off the skin, forming little oil droplets that end up dispersed in the water as an emulsion. (This is why surfactants are also known as emulsifiers.) The droplets can then be rinsed away, leaving your skin clean.
The same mechanism is at work when you’re washing dirty dishes. Even the oiliest plate can be cleaned using dishwashing detergent, which doesn’t contain any oil, but has lots of surfactants.
For example, here’s what’s in Dawn Dishwashing Liquid (in case you’re wondering, the “active ingredient” is triclosan since it’s antibacterial).

The sodium lauryl sulfate, lauramine oxide and sodium laureth sulfate are surfactants. There aren’t any oils in there! There are also supporting ingredients that don’t play a cleansing role like preservatives (phenoxyethanol, methylisothiazolinone).
Different types of cleansers
There are a few different types of cleansers you’ll find in skincare:
Traditional cleansers contain surfactants as the active cleansing ingredients. The base of the product is mostly water, and little or no oil.
Micellar water also contains surfactants in water. However, unlike traditional cleansers, micellar water surfactants should be mild enough to be left on the skin without rinsing for most people (although this can depend on the specific formula).

Related post: All About Micellar Water (video)
Cleansing oils and balms contain surfactants in a base that has a large amount of oils or other oily substances. The oily base helps lift the oil-based grease and sunscreen off your skin so the surfactants can emulsify them, and a lot of people find that these products seem to shift waterproof products a lot more easily. They’re used as the first step in a traditional “double cleansing” routine, followed with a regular cleanser (usually foaming).
However, the surfactants in cleansing oils and balms are crucial! Without surfactants, the mixture of oil and grease and sunscreen would just stay sitting on your skin.
Related post: How Do Cleansing Balms Work?
Cleansing oils don’t always remove sunscreen better
This is one thing that doesn’t always get mentioned – sometimes, a cleansing oil or balm used alone can actually be worse at removing oil-based products than a traditional cleanser.
In a product with a lot of oil, the tails of the surfactants are already partly “used up” by the extra oil. So if the proportions aren’t right, there might not be enough surfactant to emulsify the oil on your face.

This means not all the oily stuff on your face will be dispersed into droplets into the water, and will stay stuck to your skin. (This is why a second cleanser is often recommended after using a cleansing oil or balm, but whether you need one depends on the formula!)
Cleansing surfactant examples
Here are some popular cleansers and their top 5 ingredients, with the main surfactants in bold:
Traditional cleansers
- Cetaphil Gentle Skin Cleanser: Aqua, Glycerin, Cetearyl Alcohol, Panthenol, Niacinamide
- CeraVe Hydrating Cleanser: Aqua/Water, Glycerin, Cetearyl Alcohol, Phenoxyethanol, Stearyl Alcohol
- Cosrx Low pH Good Morning Gel Cleanser: Water, Cocamidopropyl Betaine, Sodium Lauroyl Methyl Isethionate, Polysorbate 20, Styrax Japonicus Branch/Fruit/Leaf Extract
- Iunik Centella Bubble Cleansing Foam: Centella Asiatica Leaf Water, Water, TEA-Cocoyl Glutamate, Disodium Cocoamphodiacetate, Glycerin
- Paula’s Choice Resist Perfectly Balanced Foaming Cleanser: Water, Sodium Lauroamphoacetate, Sodium Cocoyl Isethionate, Stearic Acid, Glycerin

Micellar waters
- Garnier SkinActive Micellar Cleansing Water: Aqua / Water, Hexylene Glycol, Glycerin, Disodium Cocoamphodiacetate, Disodium EDTA
- Bioderma Sensibio H2O Micellar Water: Water (Aqua), PEG-6 Caprylic/Capric Glycerides, Propylene Glycol, Cucumis Sativus (Cucumber) Fruit Extract, Mannitol
- Pyunkang Yul Low pH Cleansing Water: Water, Dipropylene Glycol, Propanediol, 1,2-Hexanediol, C12-14 Pareth-12
- La Roche-Posay Effaclar Micellar Water: Aqua / Water, PEG-7 Caprylic/Capric Glycerides, Poloxamer 124, Poloxamer 184, PEG-6 Caprylic/Capric Glycerides
Cleansing oils
- DHC Deep Cleansing Oil: Olea Europaea (Olive) Fruit Oil, Caprylic/Capric Triglyceride, Sorbeth-30 Tetraoleate, Pentylene Glycol, Phenoxyethanol
- Skin1004 Madagascar Light Cleansing Oil: Ethylhexyl Stearate, Cetyl Ethylhexanoate, Sorbeth-30 Tetraoleate, Centella Asiatica Extract (10,000 ppm), Helianthus Annuus (Sunflower) Seed Oil
- Klairs Gentle Deep Black Cleansing Oil: Caprylic/Capric Triglyceride, Cetyl Ethylhexanoate, Isononyl Isononanoate, PEG-7 Glyceryl Cocoate, Simmondsia Chinensis (Jojoba) Seed Oil
- Paula’s Choice Perfect Cleansing OIl: Caprylic/Capric Triglyceride, Helianthus Annuus Seed Oil, MIPA-Laureth Sulfate, Laureth-4, Laureth-7
Cleansing balms
- Clinique Take The Day Off Cleansing Balm: Ethylhexyl Palmitate, Carthamus Tinctorius (Safflower) Seed Oil, Caprylic/Capric Triglyceride, Sorbeth-30 Tetraoleate, Polyethylene
- Banila Clean It Zero Cleansing Balm: Ethylhexyl Palmitate, Cetyl Ethylhexanoate, PEG-20 Glyceryl Triisostearate, PEG-10 Isostearate, Synthetic Wax
- Paula’s Choice Omega+ Complex Cleansing Balm: Ethylhexyl Palmitate, Caprylic/Capric Triglyceride, PEG-20 Glyceryl Triisostearate, Diisooctyl Succinate, Olive Oil PEG-7 Esters
- Heimish All Clean Balm: Ethylhexyl Palmitate, Cetyl Ethylhexanoate, PEG-20 Glyceryl Triisostearate, Polyethylene, PEG-8 Isostearate

In general, these types of cleansers should be able to remove water-resistant sunscreen well enough to not irritate your skin – although it can depend on the specific cleanser formula and the sunscreen formula. It’s possible you’ll need to use the same cleanser a few times for particularly weak cleansers and stubborn sunscreens.
Do you need to double cleanse?
Double cleansing with an oil-based cleanser first is an awesome technique for gentler cleansing (for more on the benefits of gentle cleansing, check out: All About Cleansing & How to Choose a Gentle Cleanser). But it isn’t the only way to remove water-resistant sunscreen! A regular cleanser will do the job.
Related Post: All About Cleansing & How to Choose a Gentle Cleanser
This post contains affiliate links – if you decide to click through and support Lab Muffin financially (at no extra cost to you), thank you! For more information, see Disclosure Policy.




Would you consider doing an ingredients-type review of the Sunsense range? I saw on your Insta story that some of them have tinosorb (?) so it would be fantastic to know what the difference is between each type of sunscreen they put out and what they have in them!
Thanks!
I’m planning to do a video on sunscreen ingredients 🙂
Again, thank you so much for the clarification! I have recently read this claim as well and was taken aback. I mean, I do love my double cleansing, but it is not the only solution to all problems in the world!
I agree! I’m a devotee but it isn’t necessary… it’s just great for my skin! Double cleansing is sort of the coconut oil of skincare…
Hello! Thank you so much for another amazing post! You are my hero.
I want to ask: should my Clinique Take the Day Off balm be followed by some other foamy-creamy-mousse cleanser? Is there any sense in having a micellar water as a second step after the balm?
Or is it okay just to use the balm twice and consider a two-step cleansing process done?
Thank you!
You can do any of those!
Hey, Michelle. Great post! 🙂
All of the western sunscreens I’ve tried were easily removed by a single traditional cleanser. However, some eastern sunscreens are impossible to remove using a traditional cleanser only once! Sunscreens from Bioré UV Perfect line are one of them. Their first ingredient is a silicone and I believe this is why they are so difficult to be removed, am I right?
It’s probably a combination of ingredients: as well as silicones, there are also film formers (e.g. crosspolymers).
What’s the best way to remove products with crosspolymers? I’ve got a zinc oxide based sunscreen that contains a couple of them and it’s a beast to get off the skin. Two rounds with a two-phased makeup remover and two rounds with a makeup removing face wash plus washcloth doesn’t even do the job some days!
Here are the ingredients if it helps: Cyclopentasiloxane, Zinc Oxide (Micronized), C12-15 Alkyl Benzoate, Dimethicone Crosspolymer, Caprylyl Methicone, Isostearic acid, Polyhydroxystearic acid, PEG-12 Dimethicone/PPG-20 Crosspolymer, Tocopheryl Acetate.
P.S.: Your website is my go-to resource for everything related to skincare. Most of the actual products you use and review aren’t available in my country, so understanding the (applied) science helps me generalise to products available here. For this reason, I especially appreciate your explanatory and how-to posts and videos. Thanks for the brilliant job you do!
Have you tried a cleansing oil, or a microfibre make-up remover cloth? I usually find that using a mix of different cleansers works better than using the same cleanser twice.
Neither but baby oil made it worse for me. I’m a tad reluctant to buy new products for just this one tube. I have a new bottle of oil-infused micellar water, though; so I might give that a go.
Sunscreen can be such a challenge! The one I asked you about has an aesthetically pleasing finish; no white cast at all, and it looks neither too shiny nor too dry. It’s really sweat and water resistant too. If it weren’t for zinc oxide’s limitations in the face of long UVA and this particular formula’s reluctance to leave your face, it would be a a good choice.
Perhaps the company was trying to make a permanent sunscreen!
That’s strange – I was always of the impression that oil cleansing was recommended for makeup, sunscreen, etc. because it cut down on the amount of scrubbing one had to do. I must be completely inept since before oil cleansing, I’d always have to do two or three rounds of cleansing before I got all the product pillage off, and of course was left with slightly irritated skin afterwards. Maybe I’ve just been blessed in the sense that I haven’t seen the sunscreen = cement myth, or maybe I was just under the impression that others thought like I did: oil cleansing helps as part of a two-step process so that you don’t have to go in as hard with a cleanser.
Exactly! It cuts down the scrubbing and damage, but some people think it’s essential. It’s a blessing for dehydration-prone skin 🙂
Is oil cleansing more effective than a regular cleanser?
It depends on a lot of things: the surfactants used, the oils used, the proportions… in general, cleansing with pure oils will require a regular cleaser afterwards (more info: All About Oil Cleansing: A Beginner’s Guide), but cleansing oils formulated with surfactants will be more effective at getting oil-based make-up and sunscreen to move while reducing surfactant-related damage.
I love your blog– so informative, thank you!
Thank you! ^_^
Thanks a lot for the post! I’ve been a lurking fan of your blog for years btw :).
So in that case, for everyday use sunscreen (non-waterproof) I definitely don’t need any oil cleanser but just normal face wash like Hada Labo foam is enough right?
I’m a male that never use any make up, but I have got this impression from reading around the internet that I need a cleansing oil/1st step cleanser if I use sunscreen but I’m pretty lazy to double cleanse every day.
It depends on whether the cleanser is strong enough on its own (I haven’t tried the Hada Labo before so I can’t say), but you don’t need to double cleanse 🙂
To be honest I never heard that . But thanks for sharing and the oil cleansing post you shared in one of the comments is also great.
Thank you!
Hi Michelle! I read somewhere that some people just use oils such as mineral oil or mct (caprylic/capric triglycerides) for oil cleansing. I’ve been thinking doing that but I’m not sure how it would work. What are your thoughts on that and the two oils mentioned?
Hey Winnie! I did a post on oil cleansing a while ago, it might answer your questions! It’s here: Oil Cleansing: A Beginner’s Guide
Hey Michelle!
I see there’s a talk on using just a regular cleanser or doing a 2 step,
but how about an only one step cleanse, but using only an oil cleanser?
(I do wear sunscreen but I don’t wear any makeup daily)..
I was also wondering about the fact that all oil cleans’s marketing are very related to taking off makeup more then anything, but I still like using them for the way they feel. so the main question is, do I need another step of a water based cleanse? and do oil based are also suitable for non-removing makeup needs…?
Thanks a lot! this is very informative!
You don’t need a second step – as long as your skin feels clean and you don’t break out, it’s enough 😉
Cool, Thank you very much!
Hey Michelle, I was recently introduced to your site and I love it! I am trying to repair my moisture barrier/orange peel texture skin so I only want to cleanse once in the evening. I am trying to find a cleanser that I can use once and it will remove my sunscreen (Elta MD UV spf 46) Cerave products break me out, what would you recommend? Would any of the above mentioned cleansers work?
You can try a cleansing oil perhaps? I do really like them for quick and gentle cleansing! I personally still like to double cleanse even though it isn’t necessary.
I’m not sure what double cleansing is, but I have major issues getting my sunscreen off. I read that oil can remove it, so I bought a bottle of vitamin E oil and rubbed it on me in the shower. It would not rinse off no matter what I did! I ended up having to use Dawn dish soap to get all the oil and sunscreen off. It was a nightmare! I’m just posting this to warn others not to try using oil. Apparently it’s a special produce called oil cleanser that people recommend. Excuse my ignorance because I know nothing about makeup or skin care. *blush* I still have to wash my face and body like three times to get sunscreen off, and scrub so hard my skin gets irritated and dry. It really puts me off wanting to wear sunscreen.
Girl watch Lab Muffin, Liah yoo’s videos.
Hi Michelle.Is this the same for tinted sunscreens and mineral powder sunscreens as well?
Yep!
Have you got any recommendations for body cleansers as using SPF 50 on holiday quite often leaves a thick residue, white/yellowish, which I am sure is the cause of ruined white clothes. No matter how much shower gel I use the water resistant sun lotions stay put.
Hi Michelle!
Prior to reading this post, I had tested this out for myself by using a tinted EltaMD sunscreen and each of the CeraVe facial cleansers (Hydrating and Foaming) separately; neither of them removed all of the sunscreen. I now double cleanse at night on a daily basis to remove all sunscreen and any makeup that I might be wearing, and would recommend that others do the same.
Best,
Jules
*I forgot to mention that the sunscreen is zinc/titanium based.
Hello michelle how to remove sunscreen from body?
Does this apply for physical/mineral sunscreens as well? Or would double cleansing using a micellar water then a general cleanser suffice?
Yes it does apply!
About two years too late for me to comment on this but as somebody whose entire PhD was on surfactants, thank you so much for this article and for everything you do explaining the science behind skincare and formulations (also from a sci comm perspective, your explanations of everything are so amazing and clear!). I’m so glad I found your blog 🙂
Thank you so much! 😀 A PhD on surfactants sounds really interesting!
Hello! There is a recent experiment on the performance of traditional cleansers and oil cleansers when removing sunscreen: https://onlinelibrary.wiley.com/doi/full/10.1111/jocd.12995
What do you think about it? Imho, it is limited in the sense that it only compares very few selected products but it still provides some quantitative data.
I think it’s very limited – especially when the cleanser uses a surfactant system that’s pretty rare (sodium methyl cocoyl taurate and cocoamido propyl betaine). I’d expect that intra-category variation would be greater than inter-category variation here!
Thank you for your reply and insight! I understand your point and I hope there will be further studies comparing the performance of more widely used surfactant combinations.
Hello, I find that your statement is quite misleading. While I do agree if we are speaking of only sunscreen INGREDIENTS instead of the entire sunscreen product, then yes, we can remove it easily with very basic medium to high HLB surfactants. However, in most sunscreen, film formers are added to create a smooth layer of sunscreen for optimised SPF, it would naturally make “gentle” cleanser almost impossible to remove sunscreen. How about doing an actual demonstration with UV light to show that sunscreen can indeed be removed with general facial cleansers instead of makeup remover?
This has been done by @skinperspective on her Instagram IGTV.
So that means If I am using Mineral Sunscreen( I am using Neutrogena Zinc Sheer right now) and using the above mentioned traditional cleanser , I don’t have to double cleanse ???
Depends on your specific cleanser – I think for Neutrogena Sheer Zinc most cleansers won’t be enough since it’s a very sticky formula.
Hi. New to your channels. From the Mid East.
I’m a nervous Nellie who feels safer with natural (health food store) sunscreen brands …aka Zinc Oxide based (like the Weleda brand). And willing to put up with the white cast for the sake of less ingredients and a “more natural” formulation.
Just learned about double cleansing too and havent incorporated it into my routine. Have always used high quality “soap” with plenty of surfactant action to remove the sunscreen.
But still it’s very hard to remove. The mineral white cast sunscreens are greasy and persistent and one has to lather multiple times and tug to remove the product. And it doesnt seem to get off completely
So would double cleansing with an initial oil based product make sense for me? Any thoughts? Any reccs?
Or is there something I can mix with the Zinc Oxide mineral sunscreen or cut the sunscreen with (lotion, aloe vera?) Upon application to make it less viscous and less unpleasant?
I am with you on that one and use a mineral sunscreen. I usually double cleanse with an oil cleanser (Biossance), then my regular gentle gel cleanser (Indie Lee).
Hey Michelle, so what makes water resistant sunscreen different from water resistant makeup in terms of ability to be removed by standard cleansers? Both used the similar ingredients – various co/ cross-poilers, dimethicone, siloxanes to achieve water resistance and the latter cannot be effectively removed by surfactants in a standard cleanser.
The INCI list doesn’t distinguish between a lot of different polymers (e.g. there are probably hundreds of different grades of dimethicone and SLES) plus it also depends on the specific formula e.g. different proportions, if it crosslinks when it dries, if it sinks into skin etc.
Also, why can’t regular makeup be removed effectively by a standard cleanser that relies on surfactants?
It can! Really depends on the specific cleanser – a lot of the time if you apply it to your face first without mixing with water it’s easier for the tails to get into the oil of the makeup.
I double cleanse (use clinique’s take the day off and follow up wit hydrating cleanser), but I can still scrape (with fingernail) sunscreen or if I rub my skin with fingerpads I can see sunscreen residue. Why is that? I massage the balm then emulsify, too.